SolidCAM 2016: Фрезерно-токарная обработка. Что нового?
Статья об основных изменениях и улучшениях в SolidCAM 2016 для
В преддверии официального релиза SolidCAM 2016 мы решили рассказать о базовой концепции, которая легла в основу обновленного и изменившегося SolidCAM 2016 для
В первую очередь хочется сформулировать основную концепцию, новое направление которое выбрали разработчики для развития функционала SolidCAM для
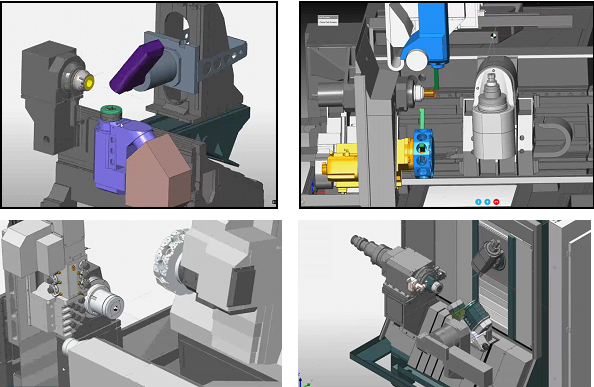
SolidCAM 2016 для фрезерно-токарного оборудования
Теперь подробнее. Что разработчики понимают под сложными
«Простой, удобный и понятный программный интерфейс» — определение, с одной стороны, всегда индивидуальное и субъективное, а с другой — цель достойная стремления. Рассмотрим ниже, что именно сделали разработчики SolidCAM для достижения этой цели.
Например, известно, что для многосуппортового
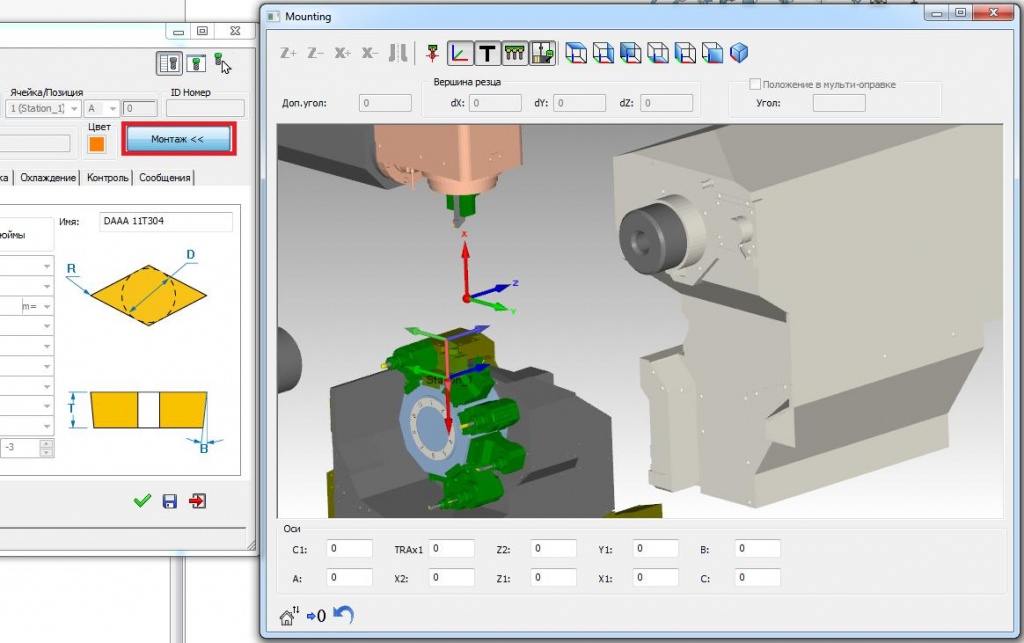
Отображение текущего положения инструмента в суппорте до визуализации траектории
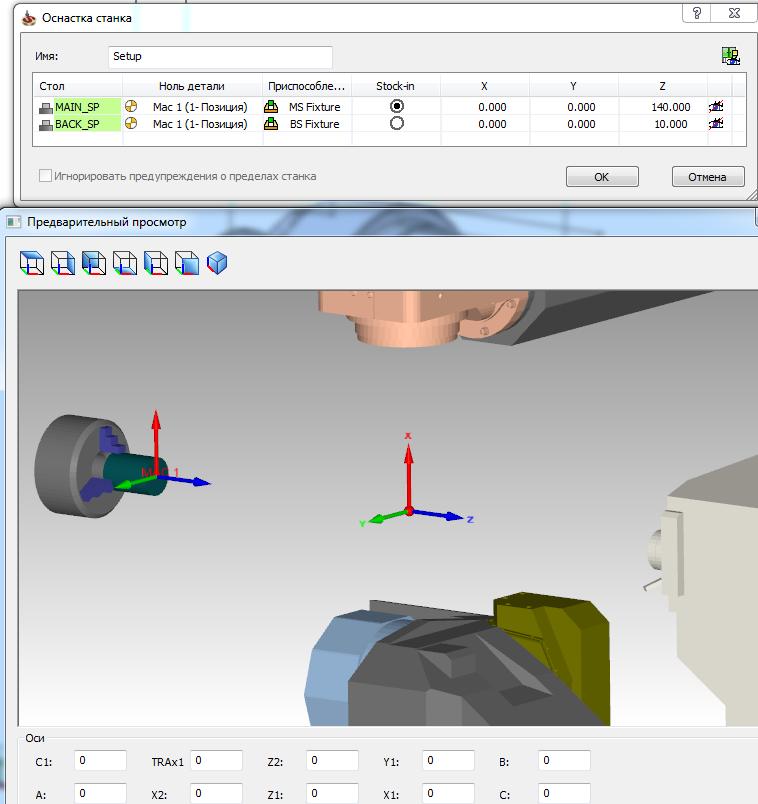
В диалоговом окне Монтаж предусмотрены меню для различных видов отображения, для дополнительной ориентации инструмента, а также интерактивные поля в разделе Оси. Они позволяют еще до генерации УП и симуляции траектории проверить перемещение узлов станка. Пользователь просто вводит значения линейных или угловых перемещений, а узлы станка совершают назначенные движения, при достижении опасных значений (столкновения, перебег) они будут изменять цвет на красный. Благодаря этому нововведению можно, например, провернуть револьверную головку со всеми установленными инструментами, чтобы проверить возможные столкновения с кожухами.
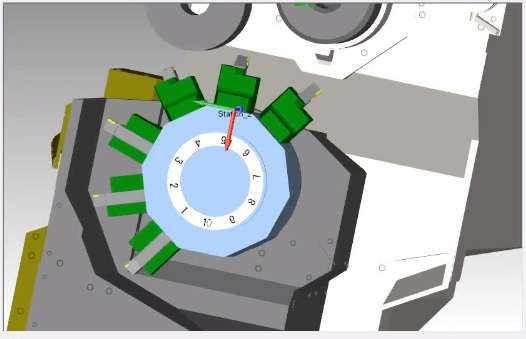
Проверка столкновения инструмента с кожухами станка
Подобное интерактивное диалоговое окно добавлено и для MCO переходов (Контроль установок станка, Machine control operation). Теперь при программировании действий с узлами станка можно полностью визуально отслеживать вводимые значения для перемещений. Кроме того, в диалоговом окне Предварительный просмотр можно ввести оптимальные значения, например, для подвода противошпинделя, и не копировать их, а, как на стойке станка, нажать кнопку Вставить величину оси, и искомое значение появится в поле МСО перехода.
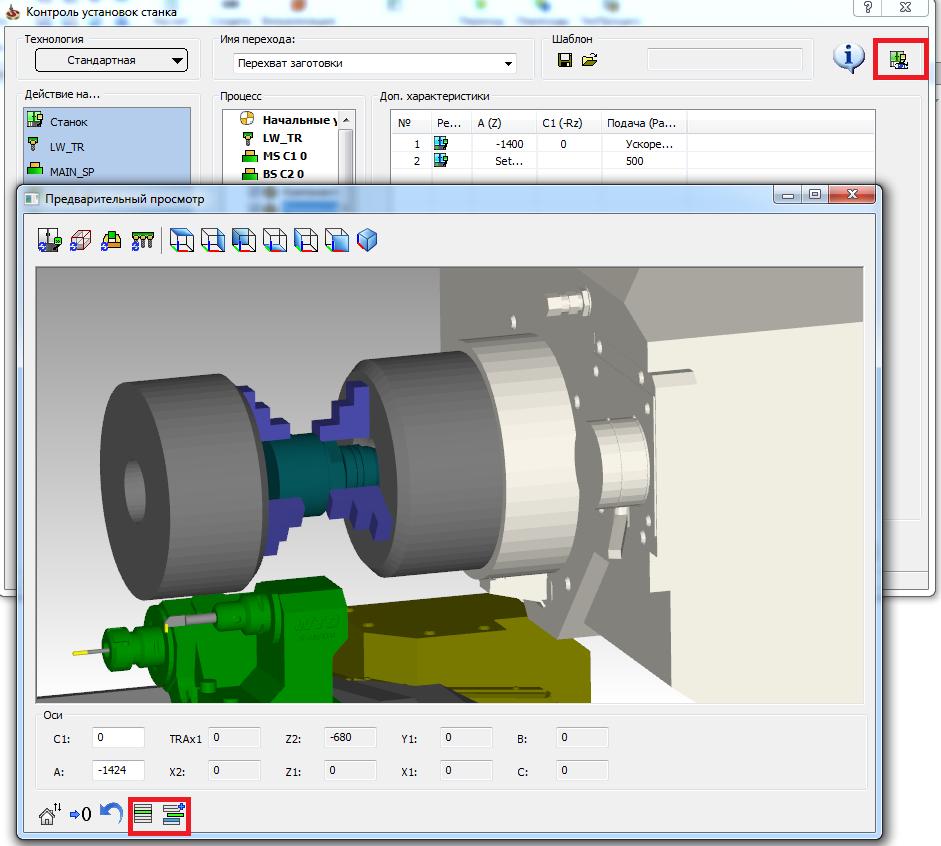
Программирование перехвата: отображение координат
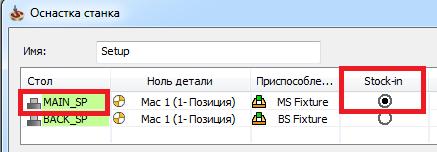
В SolidCAM 2016 привязка заготовки происходит относительно «стола» — узла станка, где она закреплена (в большинстве случаев это токарный шпиндель). Ранее приходилось описывать положение заготовки относительно всех комбинаций

SolidCAM 2015: Положение заготовки относительно узлов станка
SolidCAM 2016: Положение заготовки относительно узлов станка
Такой подход не только позволил исключить множество дополнительных систем координат, но также изменить концепцию создания самого перехода. Теперь в окне перехода в разделе Геометрия все построения происходят относительно единой системы координат детали. Вторичным является выбор комбинации
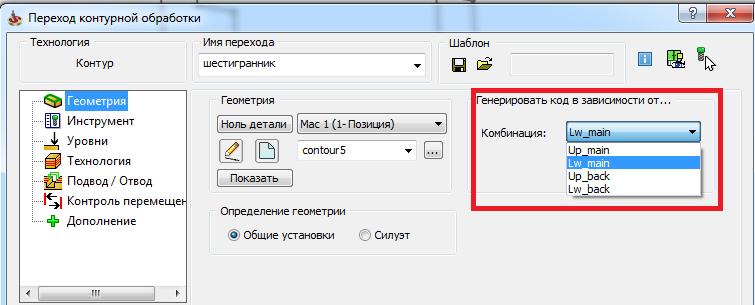
Все построения происходят относительно единой системы координат детали
Еще одним плюсом такой системы стала возможность быстрого пересчета траектории при смене комбинации
Отслеживание положения заготовки
Далее в процессе работы при возникновении необходимости создания второго установа возможны следующие варианты: перехват противошпинделем или ручная переустановка (
При перехвате во второй шпиндель, в МСО переходе появилась функция Close on stock/Release stock для шпинделей. Теперь после команды Close on stock для SolidCAM заготовка контролируется противошпинделем.
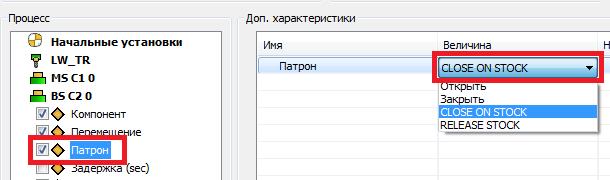
Перехват заготовки противошпинделем
Далее при попытке создать переход на главном шпинделе пользователь увидит
Сообщение об отсутствии заготовки в шпинделе
При ручной переустановке заготовки
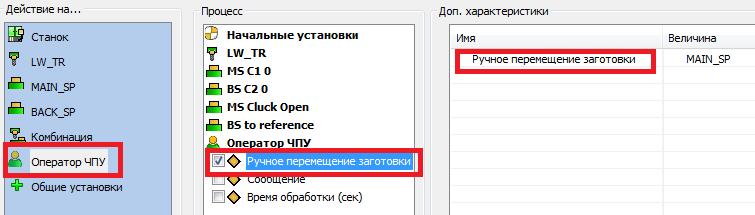
Ручное перемещение заготовки
Все вышеперечисленные функции направлены на создание максимально наглядного и удобного интерфейса для эффективного программирования станков со сложной архитектурой. Мы привели только самые основные нововведения для
Последние новости
СПРУТКАМ — заводам, колледжам и вузам!
Предлагаем алгоритм адаптации технологии для учебного и производственного процессов
Читать далееКАМ СИСТЕМЫ на ежегодной выставке «Металлообработка»
С 26 по 29 мая 2025 в Москве прошла выставка «Металлообработка» — традиционное отраслевое событие, в течение 40 лет регулярно собирает лучших специалистов и крупнейшие компании России, стран СНГ, Ближнего и Дальнего Востока и других станкостроительных регионов мира.
Читать далееСПРУТКАМ РОБОТ — выходит за рамки традиционного ПО для программирования роботов
Одно решение для автономного программирования, которое включает в себя: расчёт траектории инструмента; моделирование; оптимизацию движений; постпроцессирование и другое…
Читать далееНовое в релизе СПРУТКАМ 18.2
В этом обновлении внесли 81 изменение, содержащие исправление ошибок и улучшение рабочего процесса.
Читать далееПовышение квалификации и методы образования
27 марта компания «КАМ СИСТЕМЫ» провела вебинар в сообществе ВКонтакте на тему «Организация учебного процесса и профессиональной переподготовки преподавателей». Почему это так важно?
Читать далее